
Can GPS be Trusted? Part 3
In my previous posts, I discussed the shortcomings and benefits of utilizing GPS as a primary Position Navigation and Timing (PNT) source. I also examined methods that provide Assured PNT (or A-PNT). These include hardening the GPS signal against jamming, while at the same time jamming the enemy’s receivers, utilizing encryption to provide spoofing immunity, and complementing GPS with other forms of PNT equipment.
This final post will focus on how complementing PNT systems can be combined together in a military vehicle and how this can be efficaciously integrated with other military ground vehicle systems.
MAPS
MAPS (Mounted Assured PNT System) is a vehicle A-PNT directive defined by CERDEC (Communications-Electronics Research, Development and Engineering Center) with the intent of supporting multiple A-PNT form factors and capabilities to satisfy all military vehicle roles. For example, a HET (Heavy Equipment Transport) vehicle’s PNT system might only require only a GPS if it typically travels in convoy with more capable vehicles. However a JLTV (Joint Light Tactical Vehicle), which is utilized for demanding C4ISR (Command, Control, Communications, Computer, Intelligence, Surveillance, and Reconnaissance) missions might require a more reliable, accurate, and more costly A-PNT implementation.

The Oshkosh Defense Joint Light Tactical Vehicle (JLTV)
All vehicle A-PNT systems rely on their M-Code GPS as the primary PNT source. This provides positional accuracy to within a few feet and time to within a few nanoseconds of UTC time. Other PNT systems would act as backups to the GPS and themselves.
PNT subsystems can be obtained from multiple manufacturers, each with very different interfaces and capabilities. To produce an A-PNT product these subsystems need to be managed and controlled so that the most accurate PNT data is always provided to the vehicle.
PNT Sensor Fusion
Our industry colleague Orolia has been addressing military PNT challenges with a sensor fusion approach that combines many signals of opportunity along with traditional navigation signals. Sensors fall into two groups – external reference points which you connect via RF, optically or by other means, and internal sensors which are self-contained. Several of the former group were described in my previous post, and though they can provide great accuracy, they are susceptible to obscuration, jamming, and spoofing.
The latter group has the advantage of not relying on external reference points, so they are nearly impossible to defeat by the enemy. Some examples are:
- Precision Time: accurate time is a factor in all navigation, and achieving parts per trillion stability and accuracy is now possible and practical in tactical vehicles using Chip Scale Atomic Clocks (CSAC).
- MEMs IMU: there is a revolution in Inertial Measurement Units (IMU) using Micro Electro-Mechanical Systems (MEMs) in which small, low-power and low-cost devices are improving in performance every year, beginning to approach tactical grade.
- Vehicle Odometer: read from the VICTORY bus, inaccuracies due to wheel slip can be significant, but can be compensated for by accounting for acceleration and turning factors. Additionally, visual speedometers/odometers using down-looking cameras and image recognition can provide reliable sensing independent of wheel slip.
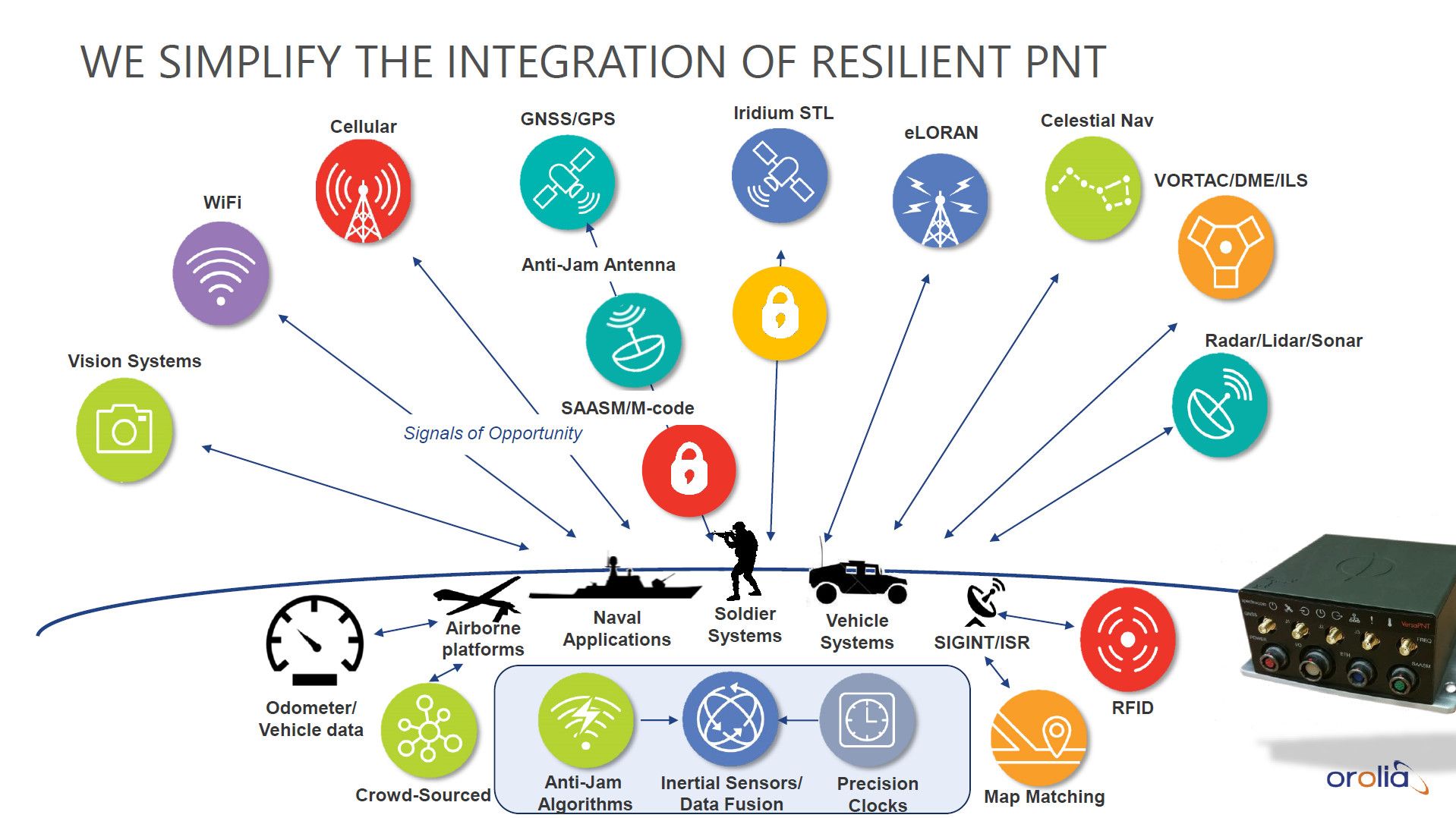
Orolia Broadshield A-PNT Software
There is no one magic bullet solution to the resilient PNT problem, which is why Orolia is combining external signals of opportunity with diverse internal sensors to create a robust navigation solution. This smart combination approach means that in addition to the standard Extended Kalman Filter techniques, to optimally estimate a time and position point in space from all the sensor inputs, Orolia also detects jamming and spoofing before the signal is used. Their BroadShield software uses algorithms to detect GNSS anomalies, so the switch to alternative sensors occurs before the navigation solution is corrupted.
Visualizing PTP: Canyon Echoes
Historically, military vehicles have employed a number of different standards to distribute time through the vehicle. These generally involve a point-to-point serial data stream to depict the actual time of day along with a 1PPS (one pulse per second) signal that accurately marks the start of each new second. As warfare becomes more network-centric, with different subsystems requiring A-PNT data, accurate time over Ethernet will become increasingly critical.
Almost since its inception, Ethernet has used NTP (Network Time Protocol)—accurate to within tens of milliseconds—for synchronizing computers to the time of day. A newer protocol, PTP (Precision Time Protocol), also known as IEEE 1588-2008 or PTP v2, can synchronize the time of day between computers (no matter how far apart they are or how many network devices are between them) with the accuracy of tens of nanoseconds.
To simplify how PTP works, I like to use the analogy of a long canyon with two people standing at each end. One person holds a megaphone in one hand and an accurate clock (in PTP terms, the Grandmaster Clock) in the other. Periodically, this person uses the megaphone to announce the current time. The other person hears this and sets their clock (in PTP terms, the Slave Clock) to that time. Due to the speed of sound, the Slave clock will now be set a few seconds later than the Grandmaster Clock.

The announcer hears echoes of their announcement as it travels down the canyon. An echo from the far end, where the listener is, will be perceived as being delayed by twice the flight time to the listener, having traveled both out and back. This value is halved and announced. When hearing it, the listener advances the Slave Clock by the announced value and both clocks are now in sync.
A similar signaling occurs in PTP, however, here the canyon is a cable and the announcement speed is close to the speed of light. As well as passive cables with fixed delays, networks also have active components such as network switches and routers that have a variable delay due to their unpredictable packet pipelining, storage and processing. Without compensation, this can lead to many milliseconds of timing “jitter”, making accurate time synchronization impossible.
Network switches, such as Mercury System’s NanoSWITCH, use a feature called PTP Transparent Clocking to remove this time jitter and return the time of day accuracy to tens of nanoseconds. This hardware level feature option times exactly how long a network packet takes to pass through the switch. This measured time is appended to the Grandmaster Clock’s PTP timing packets in a “residence time” field. The Slave Clock removes this residence time from the calculated time of day for each PTP packet along with the calculated cable flight time. Any timing jitter is thus completely removed.

Mercury’s NanoSWITCH is available with PTP Transparent Clocking to remove timing jitter
VICTORY
A surprisingly large number of vehicle subsystems require PNT and a future upgrade to A-PNT:
- EW (Electronic Warfare) systems, such as GPS jammers
- FBCB2 (Force XXI Battle Command Brigade and Below) Blue Force Tracking
- Tactical communications radios
- Command and Control computers
- Threat detection and countermeasure systems
- And, of course, vehicle navigation and mapping systems
Following a military tradition of adding independent systems to vehicles in a bolt-on approach, each system would typically have its own GPS and antenna, making an upgrade to A-PNT very costly and complex. Add to the fact that each system frequently requires its own computer, display, and keyboard—and one can see how the competition for limited cabin space was fierce. It is essential that this is addressed before A-PNT is deployed.

A cramped Humvee (the JLTV predecessor)
The VICTORY initiative was created to solve this problem. VICTORY is a rather contrived acronym for (deep breath!): “Vehicular Integration for Command, Control, Communication, Computers, Intelligence, Surveillance, Reconnaissance (C4ISR) / Electronic Warfare (EW) Interoperability”.
The VICTORY standard was developed by a government-industry standards body to address this stovepipe methodology. Through its uniform service interfaces, VICTORY allows resources to be seamlessly shared throughout the vehicle, reducing the ever important SWaP-C (Size, Weight, Power and Cost) footprint as well as system complexity. At the heart of VICTORY is:
- An Ethernet based data bus-centric design
- Sharable hardware components - deploy software additions without adding hardware
- Open standard physical and logical interfaces between system and C4ISR/EW components
- A set of shared data bus services
- Shared hardware and software Information Assurance security components to protect/control access
A-PNT is a central feature of VICTORY and is supported through Position, Orientation, Direction of Travel and Time Synchronization (PTP and NTP) services. A-PNT system manufacturers that provide systems with VICTORY service interfaces will have access to many future vehicle programs, which often require install kits for different operational configurations. The first VICTORY deployment, the JLTV—the Army’s replacement for the Humvee—is fielded with Mercury’s NanoSWITCH.
In Conclusion
GPS can indeed be trusted against spoofing through military encryption. In its hardened form, it is still the primary PNT source for all military systems, despite its continuing (although reduced) susceptibility to jamming. With GPS as its core, A-PNT provides a fully assured PNT capability via sensor fusion with a wide selection of complementary PNT systems.
The combination of A-PNT, VICTORY, and MAPS will equip future military vehicles with a robust and dependable PNT solution in the lowest overall SWaP-C footprint.


 Digital transformation with MBSE is the key to rapid innovation
Digital transformation with MBSE is the key to rapid innovation Transforming for scale: A critical part of value creation
Transforming for scale: A critical part of value creation